Neural Process-based Reactive Controller for Autonomous Racing
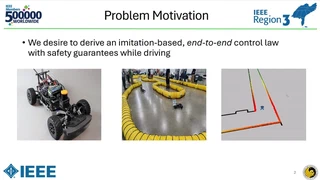
This presentation introduces a neural process-based reactive control framework for autonomous racing using an Attentive Neural Process (AttNP) and a physics-informed extension, the PI-AttNP. The proposed approach learns a Follow-The-Gap (FTG) navigation policy directly from LiDAR and vehicle dynamics data while incorporating an approximate FTG-derived control prior to improve convergence, prediction accuracy, and generalization in high-speed racing environments.
Experimental validation was performed in a simulated F1TENTH Ackermann steering racing environment, demonstrating improved control prediction performance and reduced collision frequency relative to AttNP and residual MLP baselines. The framework additionally incorporates a Control Barrier Function (CBF)-based safety filter that provides real-time collision avoidance guarantees while maintaining competitive lap completion performance.

6th-Year Ph.D. Student in Electrical Engineering with a concentration in Robotics & Autonomous Systems at the University of Central Florida.
🎓 Expected Graduation: Summer 2027
🔬 Research Identity: Learning-Based State Estimation and Control of Uncertain Dynamical Systems