SPIE Defense + Security Poster
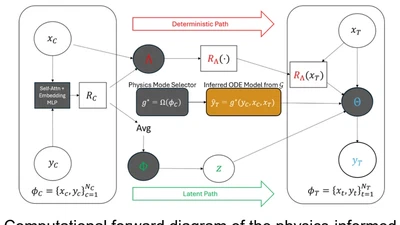
Poster presentation introducing a Physics-Informed Attentive Neural Process framework for multi-time-scale vehicle state estimation using remote sensing data.
Apr 28, 2026
•
1 min read

(he/him)
6th-Year Ph.D. Student in Electrical Engineering
School Email: de700090@ucf.edu
6th-Year Ph.D. Student in Electrical Engineering with a concentration in Robotics & Autonomous Systems at the University of Central Florida.
🎓 Expected Graduation: Summer 2027
🔬 Research Identity: Learning-Based State Estimation and Control of Uncertain Dynamical Systems
Ph.D. Electrical Engineering
2021-08-01
2027-06-30
University of Central Florida
M.S. Electrical Engineering
2021-08-16
2025-08-01
University of Central Florida
B.S. Mathematics
2017-08-01
2021-05-08
Edward Waters University
My research focuses on developing learning-based state estimation and control algorithms for uncertain dynamical systems operating in safety-critical environments. I am particularly interested in probabilistic machine learning, neural processes, uncertainty quantification, reinforcement learning, multi-agent systems, and physics-informed AI for robotics and aerospace autonomy.
My current work explores how machine learning can be integrated with physical models/known heuristics and formal uncertainty guarantees to enable robust decision-making, state estimation, and autonomous control in complex real-world systems. Applications of this research include autonomous robotics, informed remote sensing, distributed multi-agent coordination, and next-generation aerospace missions.
I am always interested in discussing research ideas, potential collaborations, and opportunities at the intersection of machine learning, robotics, control theory, and aerospace systems. Please feel free to reach out if you would like to connect.
• Hunter, D., Augsburger, J., & O’Rourke, S. (2026). Multi-Time Scale State Estimation of Vehicle Dynamics Using Physics-Informed Neural Process. SPIE Defense + Security 2026.
• Hunter, D., & Enyioha, C. (2026). Real-Time Performance Analysis of Multi-Fidelity Residual Physics-Informed Neural Process-Based State Estimation for Robotic Systems. International Conference on Robotics, Control and Automation (ICRCA).
• Hunter, D., & Enyioha, C. (2026). Neural Process-Based Reactive Controller for Autonomous Racing. IEEE SoutheastCon 2026.
• Hunter, D., & Enyioha, C. (2025). Hybrid State Estimation of Uncertain Nonlinear Dynamics Using Neural Processes. Springer Nature Machine Learning Journal (Under Review).
• Hunter, D., & Bowers, C. (2020). Quantifying the Difference of Time Complexity Between Two Probability Algorithms. Edward Waters College’s Undergraduate Journal on Research Across the Disciplines.
Poster presentation introducing a Physics-Informed Attentive Neural Process framework for multi-time-scale vehicle state estimation using remote sensing data.
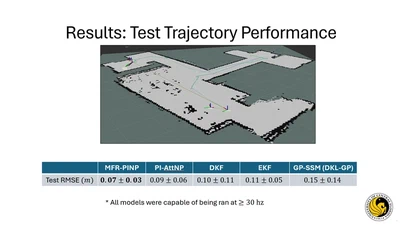
Conference presentation on the Multi-Fidelity Residual Physics-Informed Neural Process (MFR-PINP), a novel architecture applied for real-time multi-fidelity dynamic reconstruction. …

Conference presentation on a novel architecture, PI-AttNP, applied for end-to-end, reactive-based autonomous racing in a simulated F1Tenth racing environment.

Technical walkthrough of a custom ROS Noetic-based autonomous navigation system.
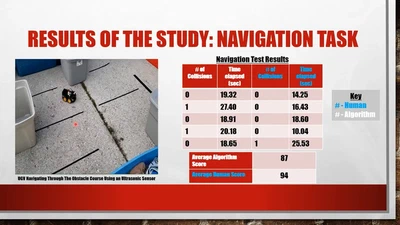
Research presentation summarizing autonomous mobile robot navigation developed during the MIT MSRP program.