Real-Time Performance Analysis of Multi-Fidelity Residual Physics-Informed Neural Process-Based State Estimation for Robotic Systems
This presentation introduces the Multi-Fidelity Residual Physics-Informed Neural Process (MFR-PINP), a novel probabilistic machine learning framework for real-time state estimation of uncertain robotic systems. The proposed approach combines low-fidelity inertial and encoder measurements with higher-fidelity LiDAR and RGB-D sensing through a residual neural process architecture that incorporates physical motion models directly into the learning process.
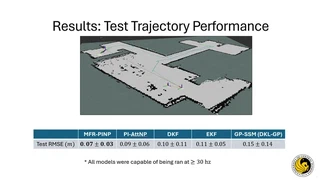
Experimental validation was performed on a physical skid-steering robotic platform, demonstrating improved estimation accuracy, accelerated convergence, and real-time deployment feasibility relative to multiple baseline state estimation approaches. The framework additionally incorporates Split Conformal Prediction to provide uncertainty-aware state estimates with statistical coverage guarantees.

6th-Year Ph.D. Student in Electrical Engineering with a concentration in Robotics & Autonomous Systems at the University of Central Florida.
🎓 Expected Graduation: Summer 2027
🔬 Research Identity: Learning-Based State Estimation and Control of Uncertain Dynamical Systems